研究紹介
本研究室では、機械力学・制御工学・人間工学を中心として、自動車・二輪車・大型連結車などの予防安全システムについて研究を行っています。自動運転、運転支援、車両制御の3つの分野から構成されています。
自動運転分野
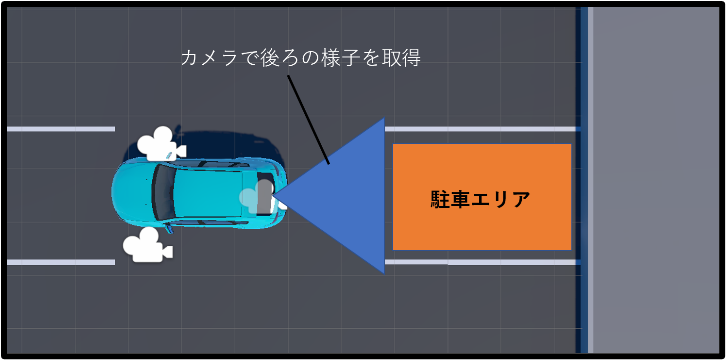
「強化学習を用いた自動駐車システムに関する研究」
苦手な運転技能としてバックや駐車などがよく挙げられます。自動駐車の研究は古くから行われており、市販車にも実用化されています。しかし駐車軌道生成に時間がかかるだけでなく、実際の駐車場面では何度も切り返さなければいけない狭い環境も存在するため、完全自動運転の実用化という観点から言えば、解決すべき課題は多いです。この研究では、深層学習を用いて駐車時の軌道生成と、目標操舵角・目標速度・目標加減速度の生成について、Unityというアプリケーションを使って検討しています。

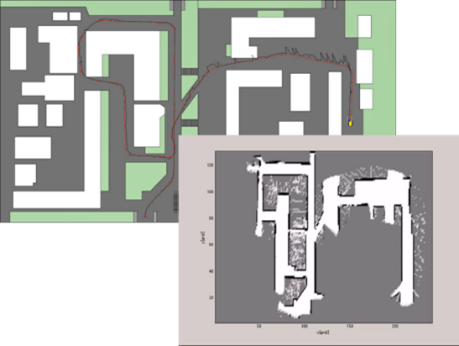
「自動運転車両の自己位置推定に関する研究」
自動運転に必要なことは、周囲の環境を認識すること、自身の位置を把握すること、指示通り動作することです。SLAM(自己位置推定をしながら地図を同時に作成する)というのは、自身の位置を把握する技術であり、ロボットの分野で発展、ロボット掃除機のルンバなどにも応用されています。古くからある技術ではありますが、演算負荷が高いことや使用するセンサが高価なことから実用場面は限定されています。このSLAM技術を応用して、ドライブレコーダの映像を3次元空間で再現する研究を行っています。事故につながりそうな状況をシミュレーション空間で再現し、そこに開発中の自動運転車両を配置して、危険な状況を回避できるかどうかの試験を行うことで、自動運転車両の性能評価を検証していきます。
運転支援分野
「信号交差点における運転支援システム」
国内の交通事故の半数以上は、交差点およびその付近で発生しており、信号のない交差点のみでなく、信号のある交差点でも多くの事故が起きています。また、赤信号により停止した車両が発進・加速を行うことで、多くの燃料が消費されます。このように、信号交差点は自動車の抱える安全や環境の問題に対して、非常に重要な鍵を握っています。 そこで、前方の信号機の情報を取得することを想定して、現在の速度を維持した場合に交差点に到達する際の信号現示を道路上に仮想的に呈示する運転支援システムについて検討しています。実験には、ドライビングシミュレータを活用しています。


※本研究の一部は、科学研究費補助金基盤研究(B)「交通実態と効果評価に基づくドライバの認知判断支援による信号交差点の安全・円滑化」の補助を受けています。
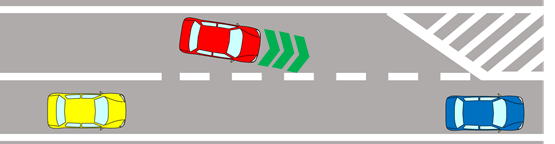
「高速道路合流部における運転支援システム」
高速道路合流部では、本線上を走行する車両の位置や速度などの相対関係を認識しながらの運転操作が要求され、負担を感じるドライバが多いのが現状です。そこで、本線上を走行する車両に安全で円滑な合流を実現するために、本線へ合流する車両に対する運転支援システムについて検討を行っています。合流車両が現在の加速度を維持した場合の合流地点を予測して、現在の加速度の過不足を合流車線上に仮想的に呈示する運転支援システムを検討しています。実験には、ドライビングシミュレータを活用しています。

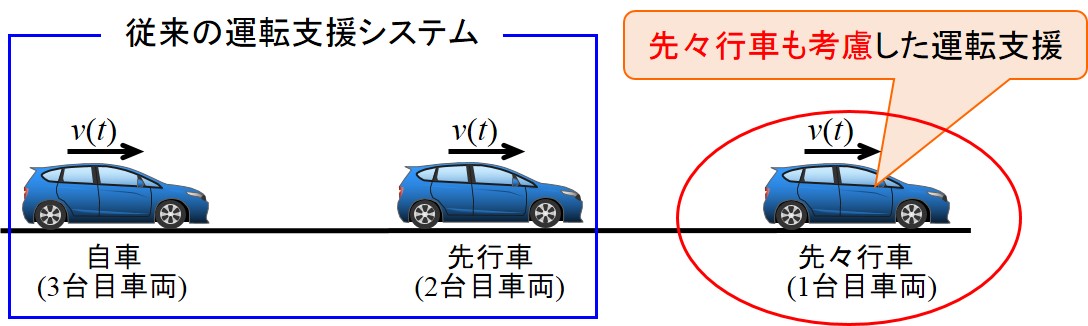
「先々行車の挙動を考慮した予測運転支援システム」
近年、先行車との衝突リスクや燃費等の情報をドライバに呈示することによる運転支援システムの開発・実用化が進んでいます。今後、安全性や燃費をさらに向上させるためには、先行車だけでなく先々行車など、より前方の情報から予測した運転支援を行うことが重要であると考えられます。 そこで先行車と自車だけでなく先々行車も含めた3台の相対関係を考慮した予測運転評価指標(PRE3: PREdiction by PRE-PREceding vehicle)を提案し、それをドライバへ呈示する運転支援システムについて検討しています。ここでは、安全運転のみでなく、省エネ運転や交通流についても対象としています。実験には、ドライビングシミュレータを活用しています。

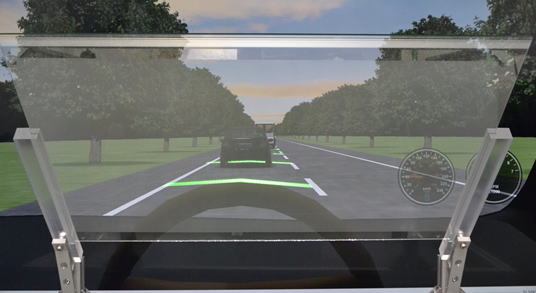
「ヘッドアップディスプレイを用いた運転支援システム」
ヘッドアップディスプレイ(HUD:Head Up Display)を用いた情報呈示は、ドライバの視線移動を軽減するだけでなく、拡張現実(AR:Augmented Reality)として空間上に物理的な意味を持たせる上でも重要なツールです。そこで、ドライビングシミュレータの模擬映像に対して、ヘッドアップディスプレイを用いて、道路上に情報呈示を行う運転支援システムについて検討しています。
車両制御分野
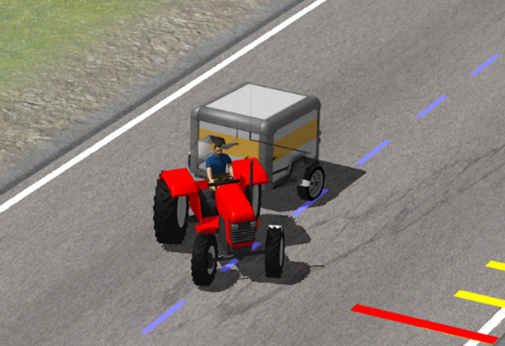
「農作業用連結車両の安定化制御に関する研究」
一度の運搬でより多くの貨物を運搬できるような大型トレーラが必要とされてきていますが、トレーラが大型化するにつれて連結車両特有の事故(スウェイ、ジャックナイフ、パワーホップなど)が起こりやすくなり、被害も大きくなることが予想されます。またトレーラの付け替えは効率的な運搬を行う際には必須であり、制御を行う時は車両(トラクタ)側のみで制御が完結していることが望ましいです。本研究では、連結車両特有の現象を記述可能な非線形車両モデルを構築し、事故の詳細な発生メカニズムを調査しています。さらに連結車両特有の非線形挙動を抑制するために、非線形制御法を用いた手法を開発しています。
「二輪車の運動と制御に関する研究」
二輪車は自動車と比較して環境負荷が低く、パーソナルモビリティビークルとしても期待されていますが、車体が転倒する可能性があり、運転するのが比較的難しい乗り物です。そこで、ステアバイワイヤ技術を二輪車の操舵系に適用することで、誰もが簡単に運転できることを目指します。さらに、操縦者が認知・判断・操作の過程でエラーを犯した場合でも、安全な状態に復帰できるような運転支援システムについても研究しています。シミュレーションでは、基礎的な車両モデルの他に、BikeSimを活用しています。その他、ライダの操縦を模擬するライダモデルや、二輪車特有の振動モードについても検討しています。

「大型連結車の運動と制御に関する研究」
セミトレーラを始めとした連結車は、自動車輸送の根幹を担いますが、一般的な大型車と比較して運動特性が異なり、最近では横転事故の記事を新聞などで目にすることがあります。そこで、セミトレーラなどの運動性能を向上させる制御や、ドライバの運転を支援する制御について検討しています。シミュレーションでは、基礎的な車両モデルの他に、TruckSimを活用しています。

研究設備
- ドライビングシミュレータ(Sirius)
