竜泉福祉センターにてロボットと触れ合えるイベントを開催しました
竜泉福祉センター「いきいきてらす」で開催された りゅうせん元気アップDAY に参加しました.
LOVOTや研究室で開発している「ゆめぼ」と触れ合えるイベントを開催しました!
竜泉福祉センターのLOVOTや日本大学理工学部のLOVOT・NICOBOも参加し,子どもからお年寄りまで,たくさんの方にロボットとの交流を楽しんでいただきました.
参加者の皆さんからは,今後の開発に向けた温かい言葉や貴重なご意見もいただきました.
これからも,人とロボットが“いっしょに笑顔になれる”研究を続けていきます!
プラッツ習志野にて小学生向けワークショップを実施しました
生成AIと3Dプリンタを活用して,オリジナルロボットのフィギアを作成するワークショップを実施しました.
2025年度は,NIT Open Dayで行った「AI×3Dプリンタによるモノづくり」のイベントを,小学生向けにアレンジしたワークショップをプラッツ習志野で開催しました.
第1回のワークショップでは,大学生スタッフと小学生が一緒になって生成AIを使い,オリジナルのロボットをイメージ画像や3Dモデルとして形にしました.
第2回のワークショップでは,3Dプリンタで出力した造形物からサポート材を外したり,色を塗ったりして,自分だけの作品に仕上げてもらいました.
子どもたちの自由な発想やアイデアに触れることで,私たちも大いに刺激を受け,ワクワクした時間を過ごすことができました.
千葉県現代産業科学館 企画展示「はかる」に出展しました
研究室で製作したパートナーロボットOvotを千葉県現代産業科学館に出展しました.
2023年度はロボコンは実施しませんでしたが,千葉県現代産業科学館の企画展示「はかる」に研究室で開発したロボットを出展しました.
展示したパートナーロボットOvotは学習支援を目的に開発したロボットです.
学習者の心拍情報からストレス状態を推定し,フィードバックすることで適度なストレス状態(一番パフォーマンスが高い状態)を持続できるように支援します.
Ovotは生産工学部の学部案内や広報誌などでも紹介していただきました.
ロボコン2022(小学生向け工作教室)
8月30日に千葉県現代産業科学館にて,実験・工作教室「対戦型ロボットを作ってみよう」を実施しました.
研究室の有志で製作したロボットをベースに,
参加者の皆さまには様々な形状のアームから相手のロボットをひっくり返すのに適したアームを選んで,
ロボットを作っていただき,対戦してもらいました.
全6台のロボットは,micro:bitを利用して制御しています.
ロボットのボディやアームはレーザー加工機を活用して作成しました.
最後には,柴嵜君の作成したボスロットとのレイドバトルも行いました.
ロボコン2021(ミニ生産ロボコン!)
2021年度は新型コロナウイルスの影響で規模を小さくして,ミニロボコンを実施しました.
今回は,余った部品を活用して作成したロボットで何でもありのレースを行いました.
研究室の有志でロボットを作成,全6台のロボットが対戦しました.
(2台は生産工学特別演習(Robo-BE)の授業で製作したロボットです.).
micro:bitやobnizを利用して制御しています.ボディは3Dプリンタやレーザー加工機を活用して作成しました.
ロボコン2019(第1回 生産ロボコン!)
2019年は初めて桜泉祭にロボコンを開催しました.
今回は,研究室の有志で作成したロボットを戦わせる企画と
来場者の方も楽しめる企画として,レゴを使って改造できるロボットを戦わせる企画を実施しました.
研究室の有志で作成したロボットの対戦
研究室の有志(C-SRADの小南君にも参加していただきました)でロボットを作成,全8台のロボットが対戦しました.
勝敗より,一番みんなを楽しませた面白いロボットを表彰するルールで実施しました.
ユニークロボット賞はC-SRADの小南君が受賞しました.レーザー加工機を利用して丁寧に作られたかっこいいロボットでした(写真左).

レゴブロックで改造できるロボットの対戦
新しい試みとして,来場者の方が改造して対戦できるロボコンを企画しました.
ロボット本体に3本の棒を設置し,相手の棒を3本倒すか,リングから押し出すと勝ちです.
レゴブロックを使って,盾を作ったり,相手を押し出すアームを取り付けるなどいろいろ工夫します.
来年は,この企画をパワーアップさせて実施する予定です.
ロボコン2018
2018年は綱島・栁澤研究室として2チーム出場しました.
自動・手動ともに空き缶を10分でいつく運べるか競う競技でした.
10チーム中4位と最下位でした.
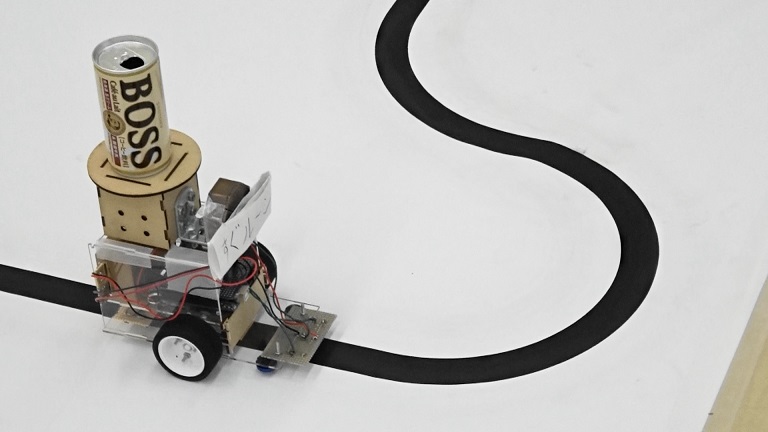
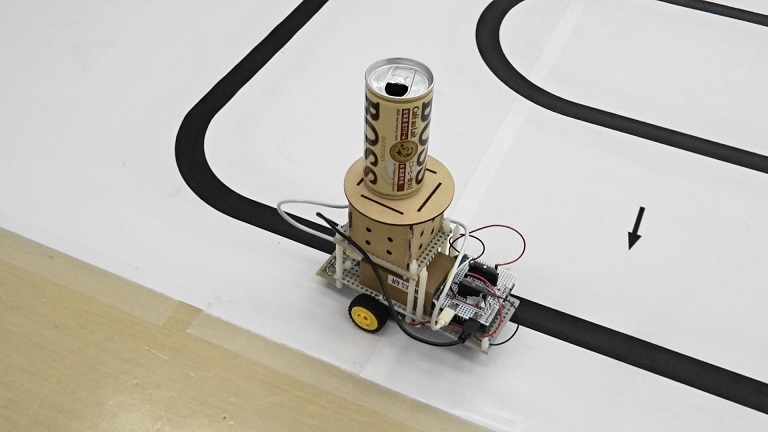
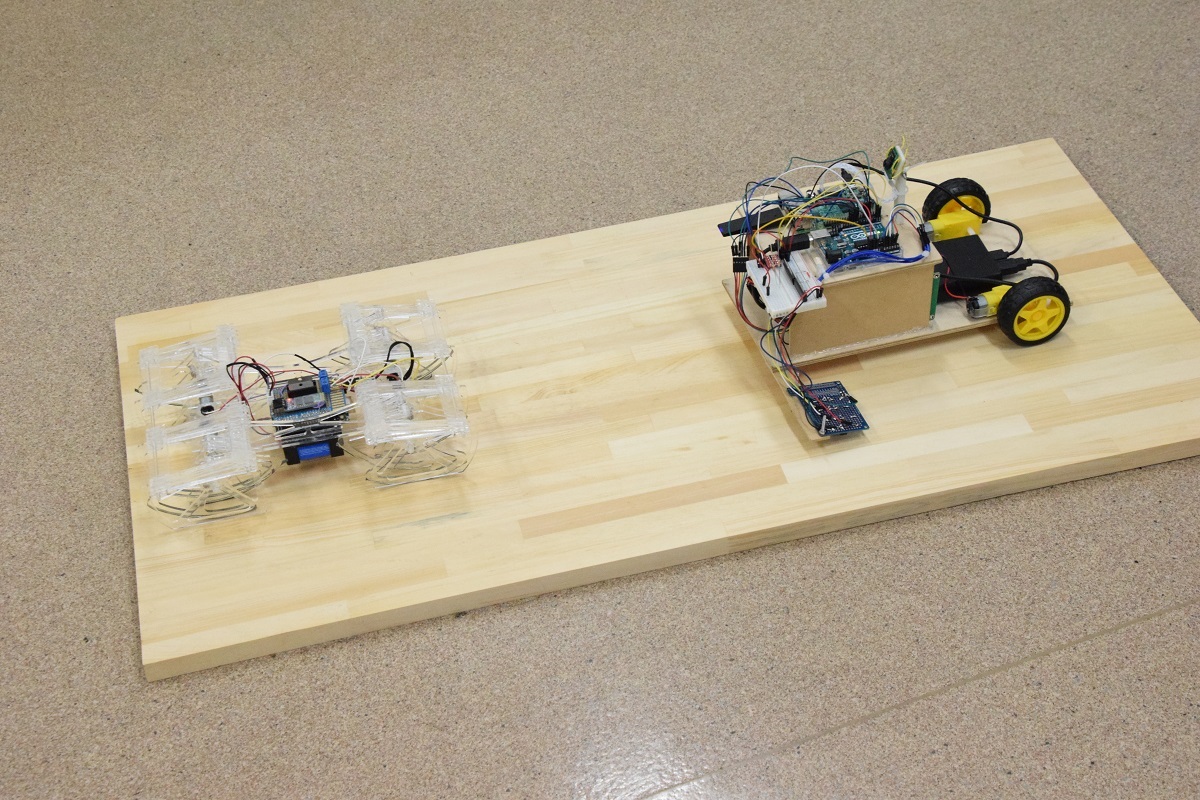
自動ロボット(ライントレースロボット)
ライントレースはArduinoを使って製作しました.今年はRobo-BEの1年生と2年生も1名ずつ参加してくれました. 2台とも確実に空き缶を運んでくれました.
1台目の動画はコチラ 2台目の動画はコチラ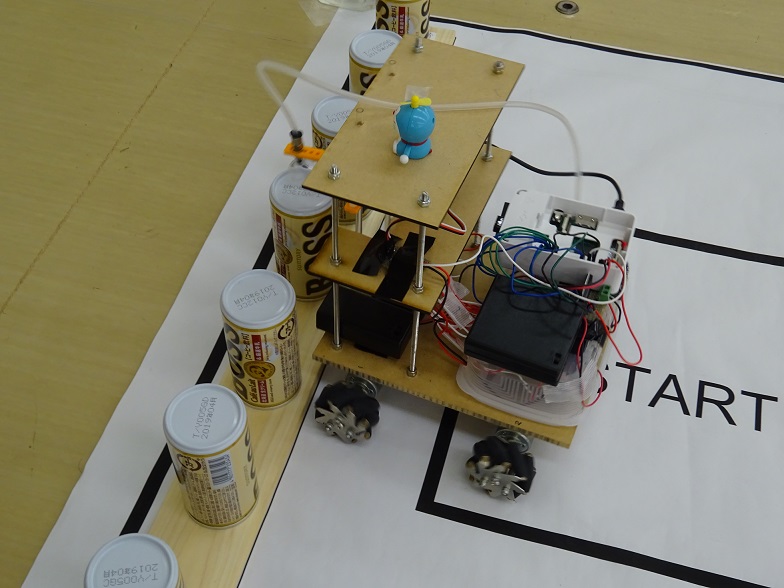
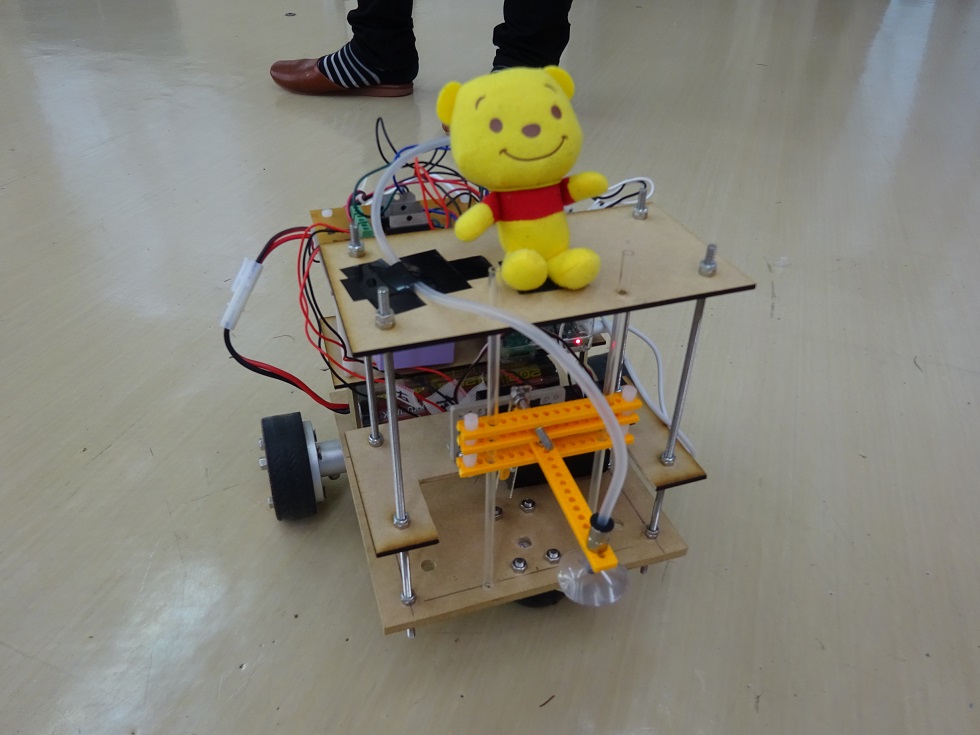
手動ロボット
手動ロボット2台はRaspberyy PIを使って製作しました.Bluetoothで通信して,操作は自作のコントローラで操作します.
空き缶を真空ポンプを使ってつかみます.
1台のタイヤはメカナムホイールを使用しました(右図).
もう1台はタイヤやプリント基板を自作しました(左図) .しかし,サーボモータの故障で残念ながら成績を残せませんでした.
ロボコン2017
2017年は綱島・栁澤研究室として2チーム出場しました.
競技は,ライントレースと玉入れ・レース・荷物運び,さらにゴルフボールを使ったホッケーでした.
残念ながら今年は,入賞できませんでした.
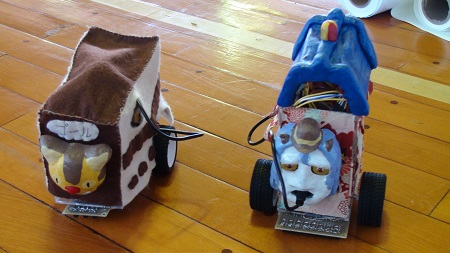
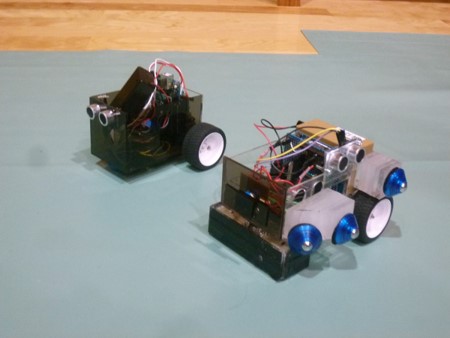
自動ロボット(ライントレースロボット)
ライントレースロボットはRaspberry Piを使って製作しました.
左の猫バス風ロボットはCSRADの皆さんが,左の朧車風ロボットは辻君が作りました.
どちらも外装は川田君と2年生の池邉さんと作ってくれました.ゴールすると朧車は目が,猫バスは体が光ります.
これらをベースにRobo-BEの2年生科目の教材を開発していきます.


手動ロボット
手動ロボット1台はRaspberyy PIを使って製作しました.操作はスマートフォンから行います.
タイヤはメカナムホイールを使用しました.荷運びは速かったのですが,ホッケーがイマイチでした.
もう一台はArduinoで作り,PS3のコントローラで動きます.設計は綱島研究室の藤城君が頑張ってくれました.
ロボコン2016
2016年は綱島・栁澤研究室として2チーム出場しました.
競技は,ライントレースとピンポン玉を使った玉入れの2つでした.
結果は,優勝と準優勝でした!
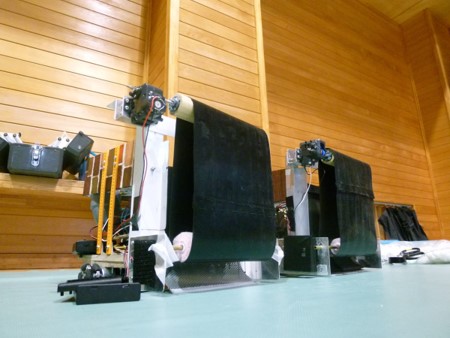
自動ロボット(ライントレースロボット)
ライントレースロボットはどちらもArduinoを使って製作しました.奥の黒いロボットは,小型化がコンセプトで,PID制御で安定した走行ができます.
手前のロボットはスピード重視で田中君が直前まで調整を頑張ってくれました.
本当は,ライントレースのほかに壁を認識してショートカットする機能も実装したかったのですが,成功率が低かったため本番は使いませんでした.
手動ロボット
手動ロボットはRaspberyy PIを使って製作しました.操作はスマートフォンから行います.
タイヤはオムニホイールを使用し,前後左右にスムーズに移動できます.
研究でも使用しているPythonを使って開発したので,プログラムの勉強にもなりました.
どちらも前方に取り付けられたベルトコンベアでピンポン玉を回収します.その仕組み上,ちょっとした段差に引っかかってしまう欠点があります.
ピンポン玉の発射はピッチングマシンのような仕組みでボールを発射します.精度はあまり高くないので,ともかく数を打つ作戦で戦いました.